Active Spine on Stoch 2
Learning Active Spine Behaviors
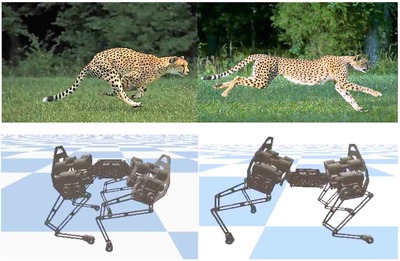
In this work, we provide a simulation framework to perform systematic studies on the effects of spinal joint compliance and actuation on bounding performance of a 16-DOF quadruped spined robot Stoch 2. Fast quadrupedal locomotion with active spine is an extremely hard problem, and involves a complex coordination between the various degrees of freedom. Therefore, past attempts at addressing this problem have not seen much success. Deep-Reinforcement Learning seems to be a promising approach, after its recent success in a variety of robot platforms, and the goal of this paper is to use this approach to realize the aforementioned behaviors. With this learning framework, the robot reached a bounding speed of 2.1 m/s with a maximum Froude number of 2. Simulation results also show that use of active spine, indeed, increased the stride length, improved the cost of transport, and also reduced the natural frequency to more realistic values

Citation
@inproceedings{bhattacharya2019learning,
title={Learning active spine behaviors for dynamic and efficient locomotion in quadruped robots},
author={Bhattacharya, Shounak and Singla, Abhik and Dholakiya, Dhaivat and Bhatnagar, Shalabh and Amrutur, Bharadwaj and Ghosal, Ashitava and Kolathaya, Shishir and others},
booktitle={2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)},
pages={1--6},
year={2019},
organization={IEEE}
}
Related Papers
|
2019 October |
IEEE International Conference on Robot & Human Interactive Communication (RO-MAN) New Delhi, India. |
People
Abhimanyu

Shalabh Bhatnagar

Bharadwaj Amrutur

Ashitava Ghosal
")