We are a team of legged robot enthusiasts based out of Indian Institute of Science, Bengaluru. We are mainly interested in advanced mobility in extremely challenging terrains. The team consists of technical staff members, students, interns and faculty with varying backgrounds and interests.
News
-
March 02, 2024
We are thrilled to announce that our paper, “Polygonal Cone Control Barrier Functions (PolyC2BF) for safe navigation in cluttered environments,” has been accepted at the European Control Conference 2024 (ECC), Stockholm, Sweden.
-
January 31, 2024
Our recent work titled “Barrier Functions Inspired Reward Shaping for Reinforcement Learning” has been accepted to 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan. (ICRA 2024).
-
January 26, 2024
We are thrilled to announce that two of our papers are accepted at the American Control Conference (ACC), Toronto, Canada, this time! 📝✨ “Control Barrier Functions in Dynamic UAVs for Kinematic Obstacle Avoidance: A Collision Cone Approach” by Manan Tayal, Rajpal Singh, Jishnu Keshvan & Shishir Kolathaya and “Collision Cone Control Barrier Functions: Experimental Validation on UGVs for Kinematic Obstacle Avoidance” by Bhavya Giri Goswami, Manan Tayal, Karthik Rajgopal, Pushpak Jagtap & Shishir Kolathaya.
-
September 25, 2023
Our recent work titled “Collision Cone Control Barrier Functions for Kinematic Obstacle Avoidance in UGVs” has been accepted to Indian Control Conference (ICC) 2023, Vishakhapatnam, India.
Research





Dynamic Manipulator
A highly dynamic, torque controllable manipulator for quadruped robots.

")
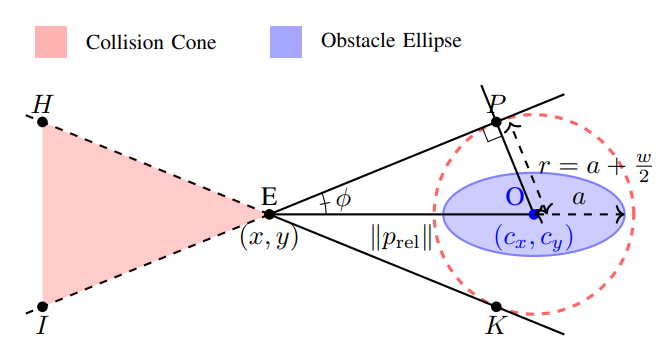
Collision Cone Control Barrier Functions (C3BF)
Control Barrier Functions for Kinematic Obstacle Avoidance :A Collision Cone Approach
Force control for Robust Quadruped Locomotion: A Linear Policy Approach
A framework for designing controllers to achieve robust blind quadrupedal walking using force control thorugh learnt linear policies.
Energy Based Control Barrier Functions
A new class of CBFs for robotic systems that augment kinetic energy with the traditional forms.
People
Faculty
Shishir Kolathaya (HEAD)
Assistant Professor

Bharadwaj Amrutur
Professor

Shalabh Bhatnagar
Professor

Ashitava Ghosal
Professor
Staff






Nithin Vasishta



Srihari Vemuru
Darshit Darji
Vishnu Joshi
PhD Students

Pramod Pal
Design of Legged Robots

Vamshi Kumar Kurva
Learning Based Control
Manan Tayal
Safe Robot Learning and Control

Aman Singh
Design and Control Co-Optimization

Aditya Shirwatkar
Model Based RL
Masters Students
GVS Mothish
RAS, IISc
Sudharsan
RAS, IISc
Vaishnav B
RAS, IISc

Shreyansh Sharma
RAS, IISc

Aastha Mishra
M Tech (Res)

Prakrut Kotecha
M Tech (Res)
Tirth Siyala
M Tech (Res)
Alumni
Aditya Sagi
Now at Chirathe Robotics
Sangeet M
MTech AI, 2023, Now at Siemens Technology
Subhojyoti Khastagir
MTech CSA, 2023
Phani M Thontepu
MTech AI, 2022
Ankit Pandita
MTech AI, 2022, Now at LTIMindtree NxT
Palaparthi Govindu
MTech CSA, 2022, Now at Dozee
Devaraju Vinoda
MTech CSA,2022, Now at Oracle
Soumya Rani
MTech CSA, 2021, Now at Quantiphi